|
Hi, I am a 5th year Ph.D. student in the Media Lab, Dept. Electrical Engineering at The City College of New York, CUNY, advised by Professor Ying-Li Tian. My current research focuses on 3D perception and scene understanding. Prior to CUNY, I finished my Bachelor degree from Beijing University of Posts and Telecommunications. Email / Google Scholar / LinkedIn / Github |

|
News
|
|
My research mainly focus on the 2D/3D scene understanding and adopts deep learning methods to various down-stream tasks including detection, segmentation and scene flow estimation to get the perception of the surrounding world. |
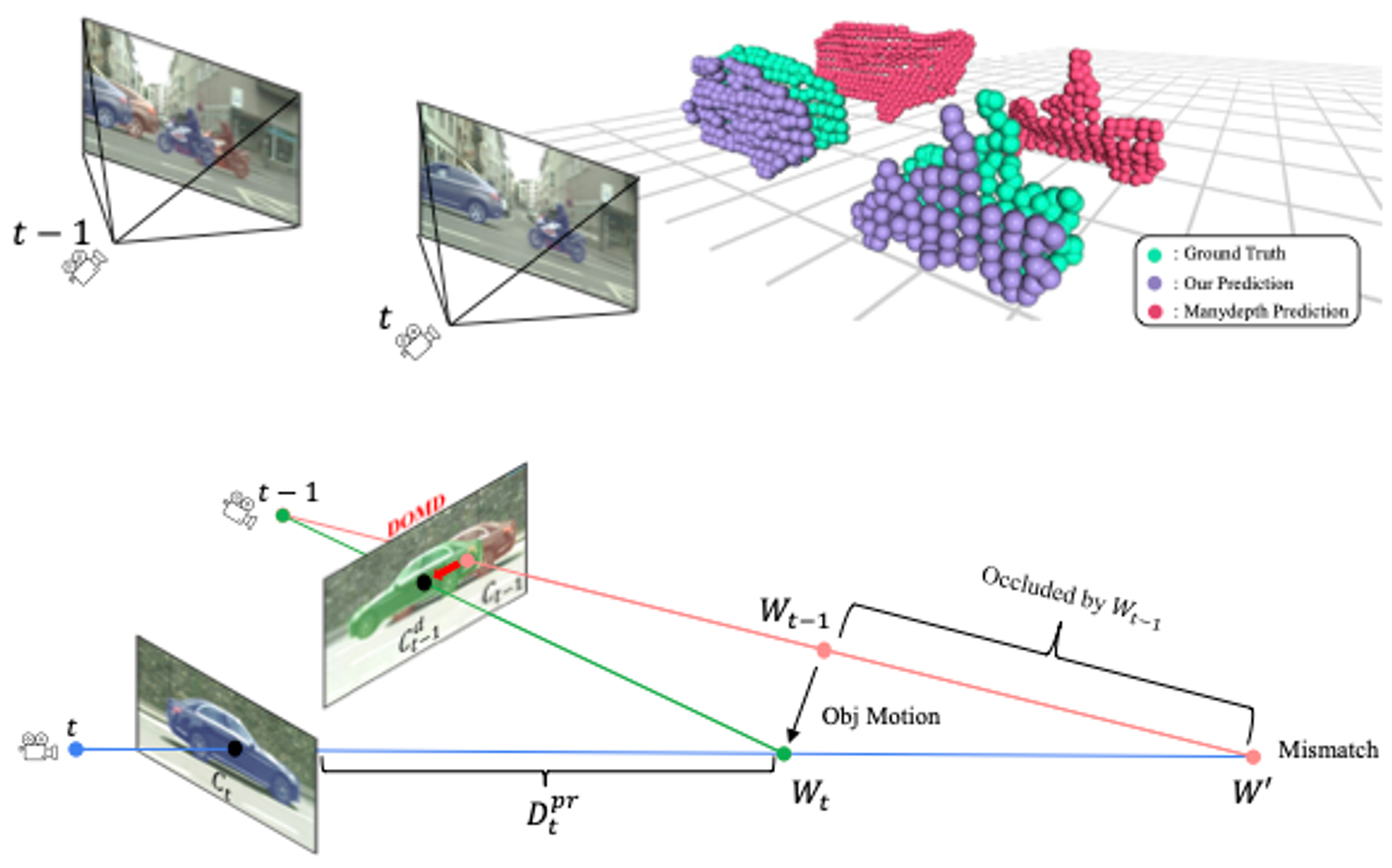 |
Ziyue Feng, Liang Yang, Longlong Jing, Haiyan Wang, Yingli Tian, Bing Li, ECCV, 2022 project page / PDF / video / demo We propose Dynamic depth. |
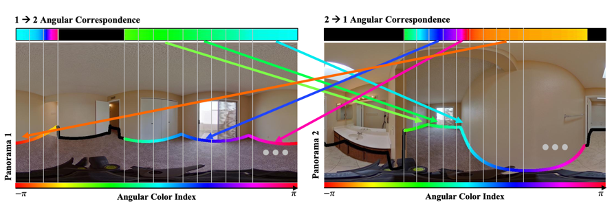 |
Will Hutchcroft, Yuguang Li, Ivaylo Boyadzhiev, Zhiqiang Wan, Haiyan Wang, Sing Bing Kang ECCV, 2022 project page / PDF / video / demo We propose Covis-pose. |
 |
Haiyan Wang, Yingli Tian, Pending project page / PDF / video / demo We propose an extensive review of deep learning research on sequential point clouds. |
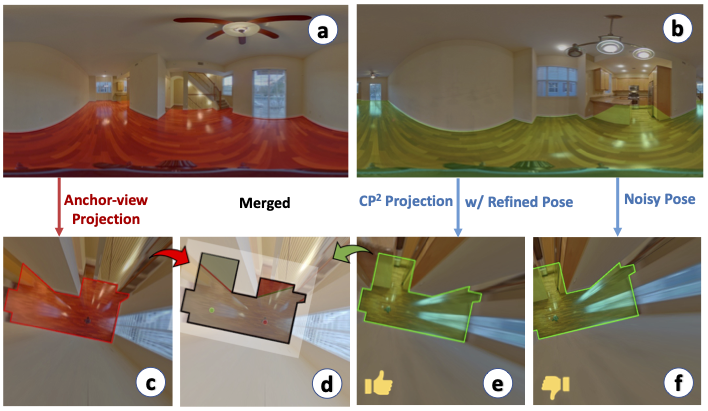 |
Haiyan Wang, Will Hutchcroft, Yuguang Li, Zhiqiang Wan, Ivaylo Boyadzhiev, Yingli Tian, Sing Bing Kang CVPR, 2022 project page / PDF / video / demo We propose a novel joint layout-pose estimation network from multi-view panorama images. |
 |
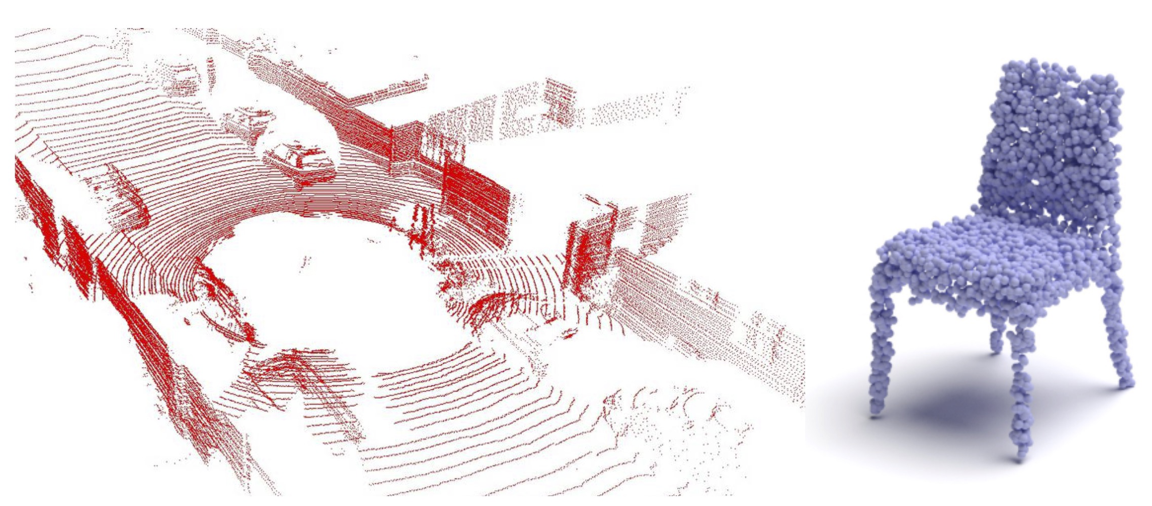
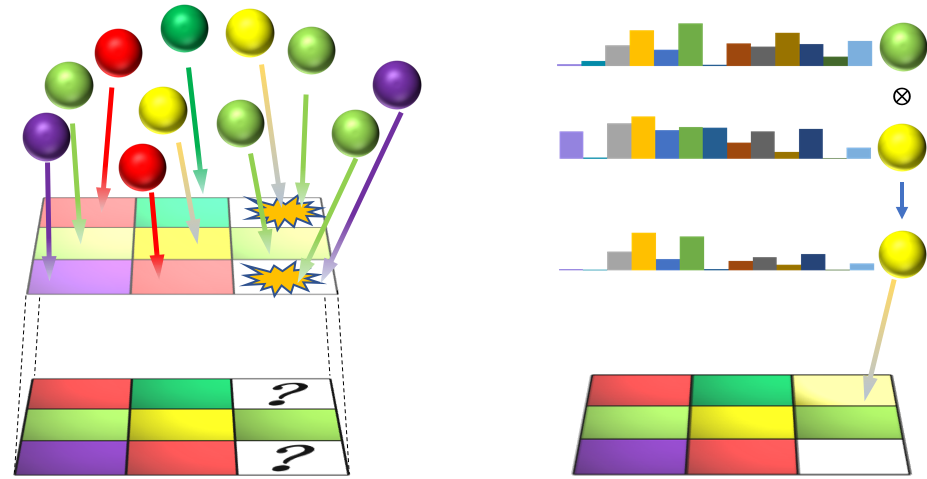
Haiyan Wang, Jiahao Pang, Muhammad Asad Lodhi, Yingli Tian, Dong Tian CVPR, 2021 (Oral Presentation) project page / PDF / video / demo We propose a new spatial-temporal attention mechanism to estimate 3D scene flow from point clouds. |
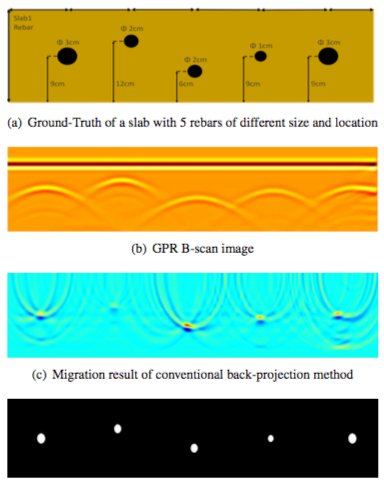 |
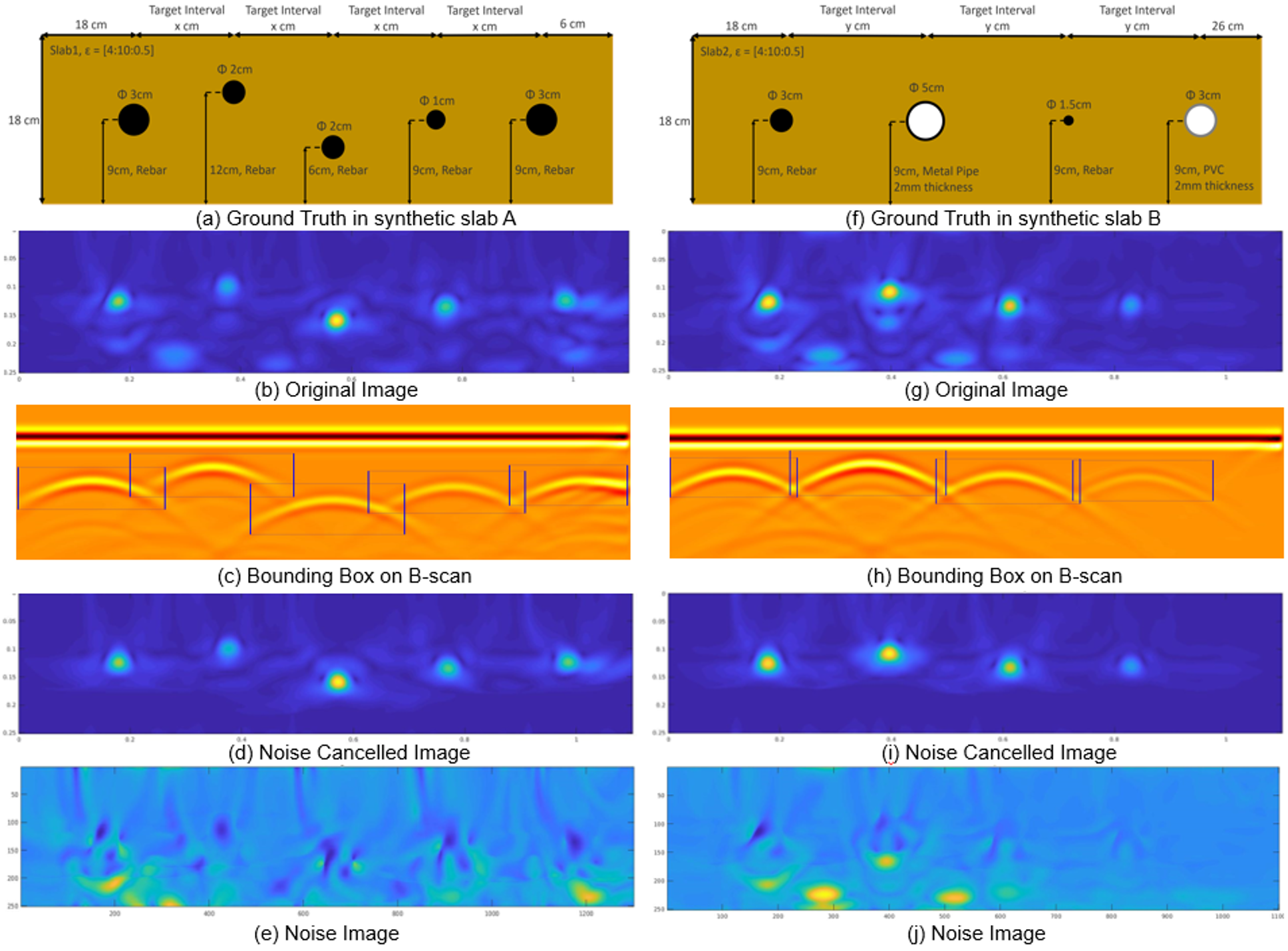
Jinglun Feng, Liang Yang, Haiyan Wang, Yingli Tian, Jizhong Xiao WACV, 2021 project page / PDF / video / demo In this paper, we present MigrationNet, a learning-based approach to detect and visualize subsurface objects. |
 |
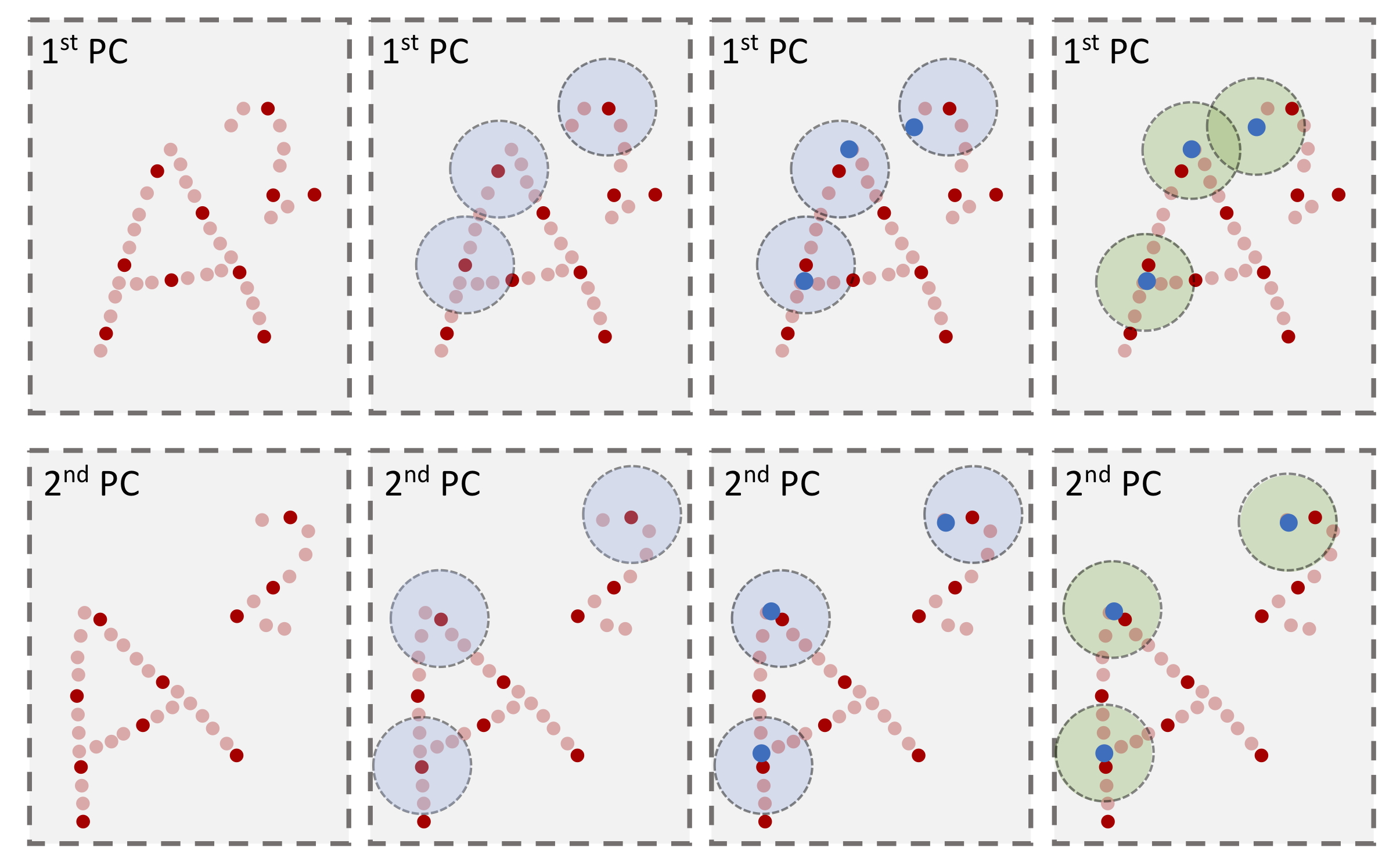
Haiyan Wang, Liang Yang, Xuejian Rong, Jinglun Feng, Yingli Tian WACV, 2021 project page / PDF / video / demo Self-supervised dynamic feature learning of sequential point cloud. |
|
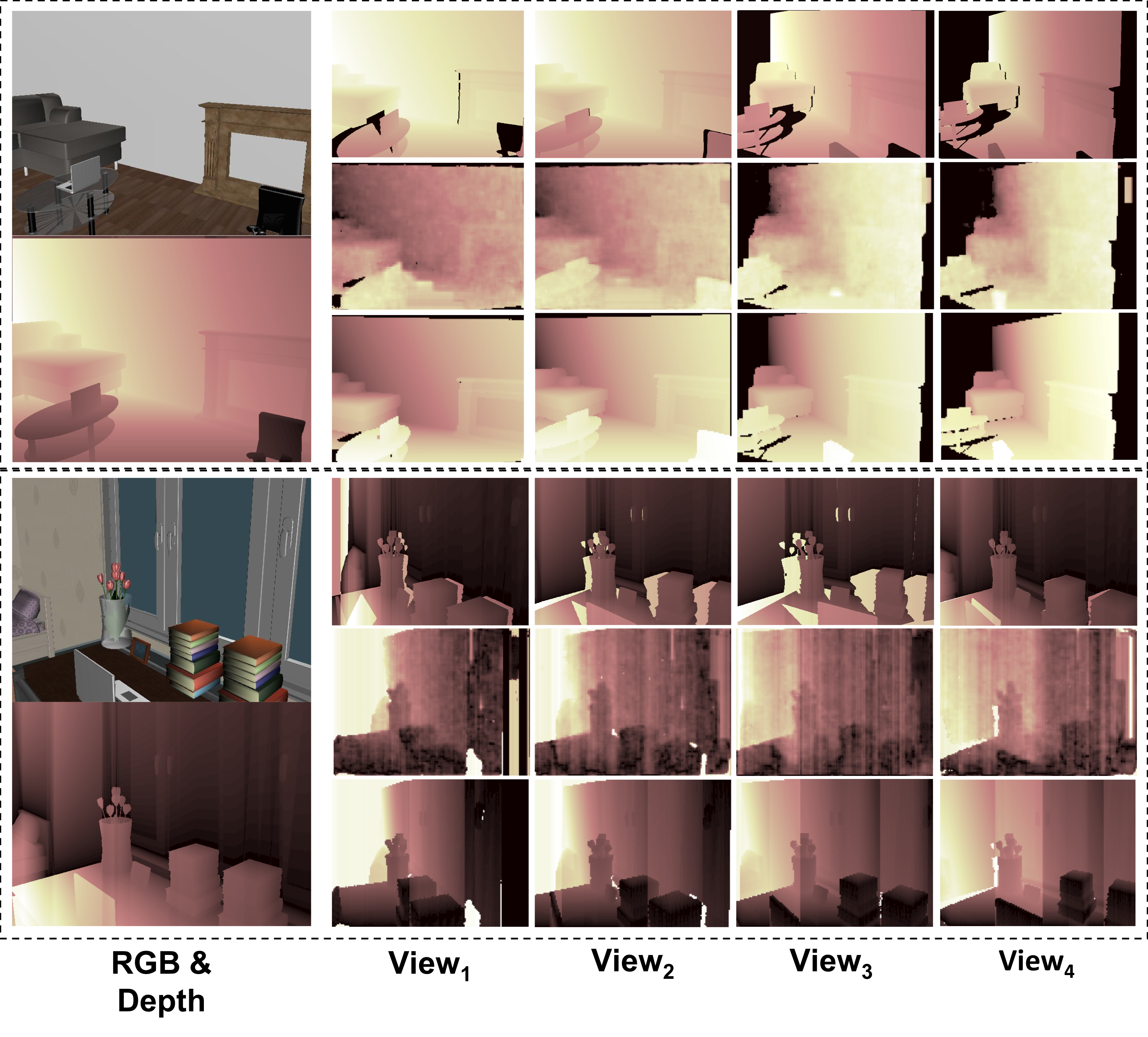
Haiyan Wang, Liang Yang, Xuejian Rong, Yingli Tian ICPR, 2020 project page / PDF / video / demo 3D point cloud completion |
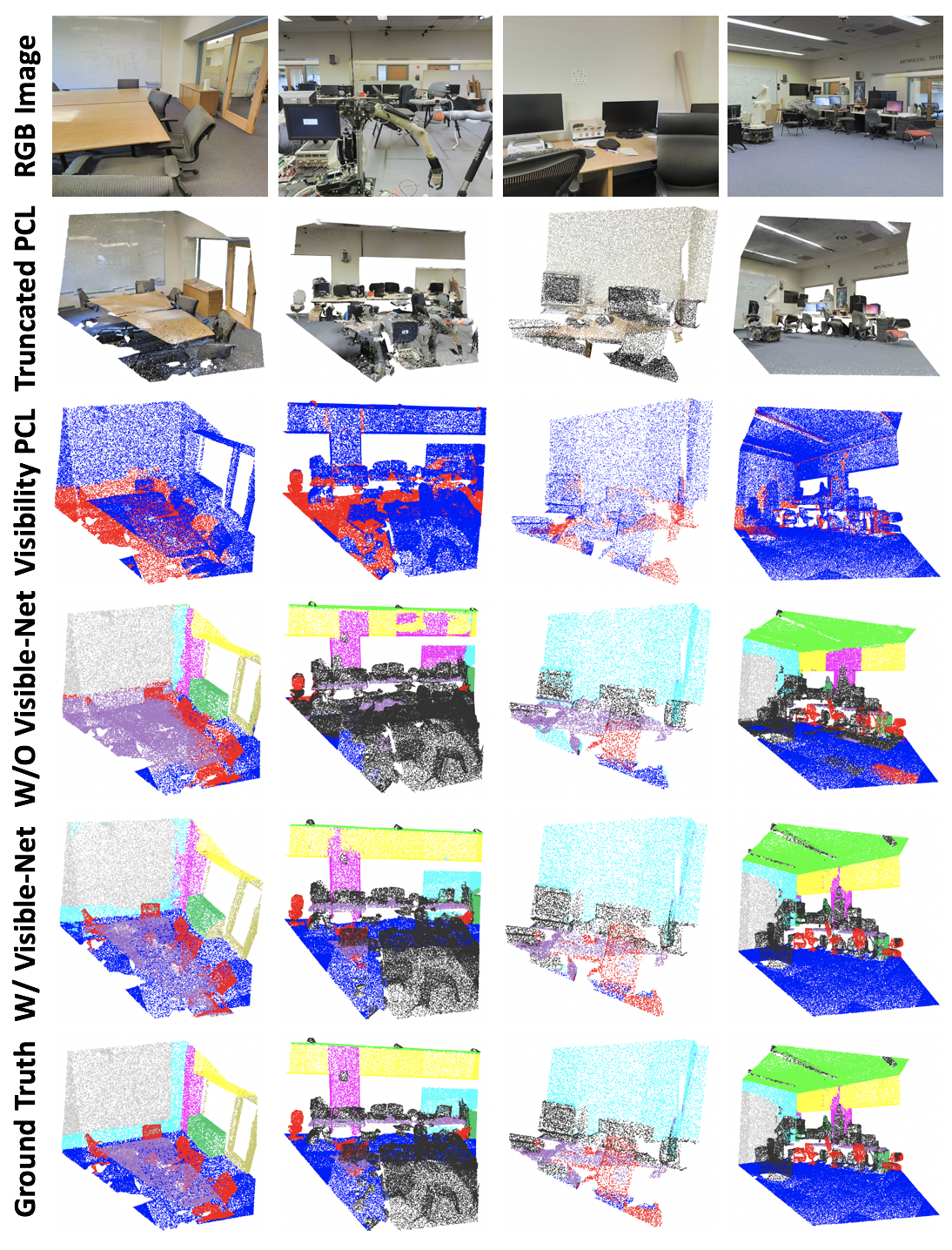 |
Haiyan Wang, Xuejian Rong, Liang Yang, Jinglun Feng, Yingli Tian Under the review. project page / PDF / video / demo Designed a joint end-to-end 2D-3D deep architecture to compute hierarchical to apply only 2D supervision for 3D semantic point cloud segmentation of wild scenes. In conjuction with the proposed Visible-Net to solve the objects occlusion problem. |
 |
Jinglun Feng*, Liang Yang*, Haiyan Wang, Yifeng Song , Jizhong Xiao, ICRA, 2020. project page / PDF / video / demo Implemented visual inertial fusion to estimate the pose of the GPR sensor and proposed an improved random motion migration method which eliminates the limitation of current GPR data collection procedure which requires the straight line motion along survey grid. |
 |
Haiyan Wang, Xuejian Rong, Liang Yang, Shuihua Wang, Yingli Tian BMVC, 2019 (Oral Presentation, 3.8% acceptance rate) project page / PDF / video / demo Designed a joint 2D-3D deep architecture to compute hierarchical to apply only 2D supervision for 3D semantic point cloud segmentation of wild scenes. Integrated graph-based convolution and a novel reprojection method, named perspective rendering to enforce the 2D and 3D geometric correspondence. |
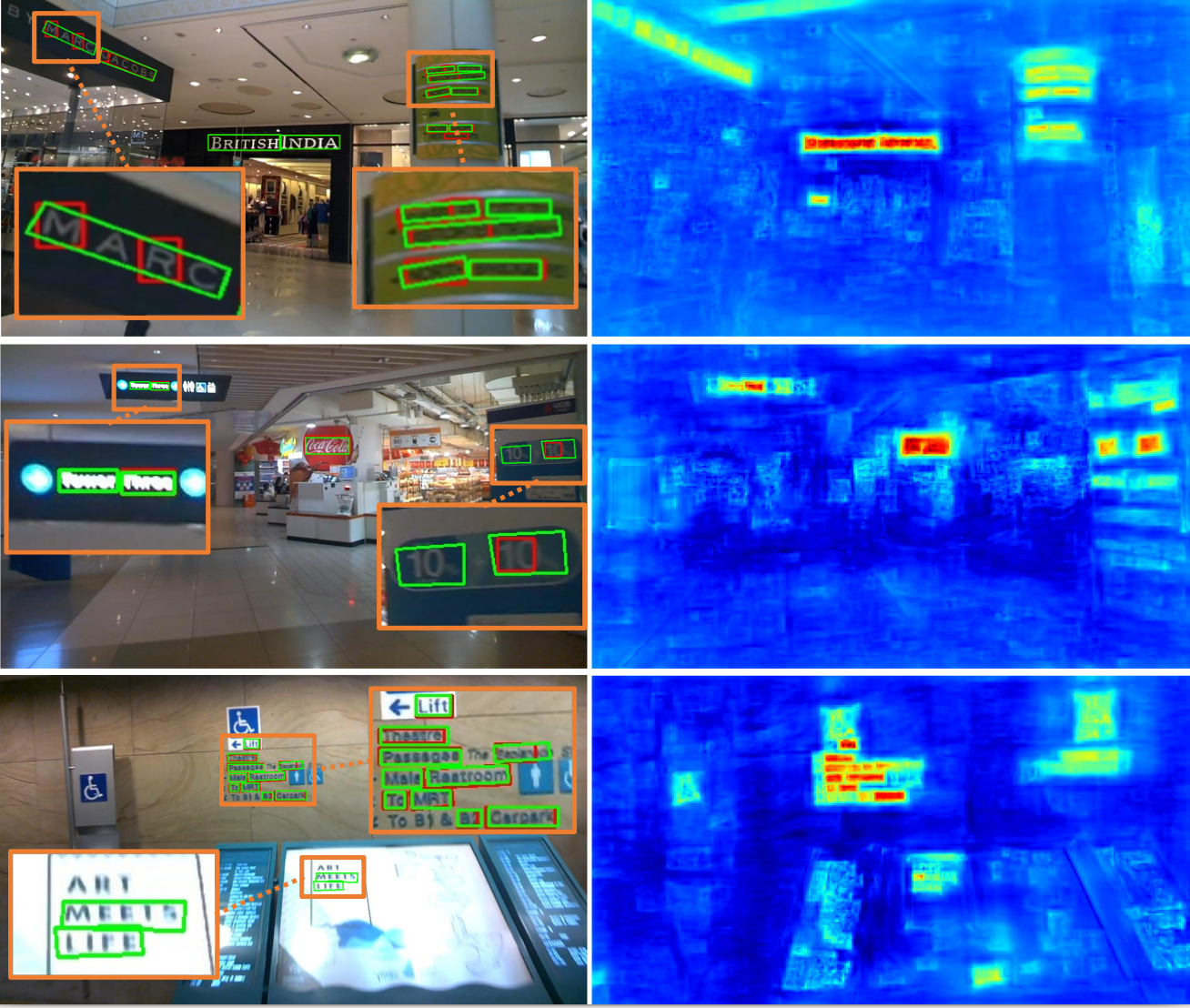 |
Haiyan Wang, Xuejian Rong, Yingli Tian ICME, 2019 PDF / Bibtex Designed a deep learning framework for text detection from the instance-aware segmentation perspective. Specifically, a text-specific attention model and a global enhancement block are introduced to enrich the semantics of text detection features. |
TA, Spring Term, 2021: I2200: Digital Image Processing (The City College of New York). Grade TA, Spring Term, 2022: I2200: Digital Image Processing (The City College of New York). Grade |
Munib Ahsan (Oct 2020 - 2021 May): Software Engineer at Northrop Grumman Corporation. Zoya Shafique (Oct 2021 - ): Master at CCNY. |
Last update: 2022.03. Thanks. |